Performance Optimisation and Productivity
Finite Element Method
Finite Element Method (FEM) is a general numerical method for solving physical problems in engineering analysis and design. It is used for modelling of a continuum in steady-state, propagation (transient), and eigenvalue problems in many domains, e.g. structural mechanics, CFD, thermodynamics, electromagnetics, etc. It is a robust universal method able to solve large complex systems for the price of relatively high computational demands.
The basic principle lies in converting a solution of a partial differential equation (PDE) problem into a solution of a set of systems of linear algebraic equations \(Au=f\), where \(A\) is a sparse system matrix (e.g., stiffness matrix, thermal conductivity matrix, etc.), \(u\) is a vector of unknown state variables (e.g., displacements, temperatures, etc.) in domain mesh nodes, and \(f\) is a known right-hand side vector (e.g., external forces, heat sources, etc.). The FEM then calculates an approximate (numerical) solution of the original problem with a given precision.
The solution of a particular physical problem using the FEM requires the following steps:
- System idealization and definition of a mathematical continuum-system model, material parameters, boundary conditions, etc.
- Creation of a mesh of finite elements of the continuum-system model using a discretization method
- Assembling of local FEM systems per element
- Assembling of the global FEM system
- Incorporation of boundary conditions
- Solving of the FEM system using some direct or iterative sparse linear-system solver
- Interpretation of results
A working example of a FEM solution of a 1D static (time-invariant) model that can represent e.g. heat transfer, diffusion, linear elasticity etc. In MATLAB follows:
\[-(ku')'=f\;\;\;in\;\;\;\Omega=(0,l)\\ u(0)=\hat{u}\\ -k(l)u'(l)=\hat{\tau}\]where \(k\) is a material function defining material properties, \(u\) is an unknown function (quantity, e.g. temperature), \(f\) is a known scalar function (e.g. source term), \(\Omega\) is a domain of a problem given by a range between \(0\) and \(l\), \(\hat{u}\) is a given value of the solution \(u\) in the point \(0\) (Dirichlet boundary condition), and \(\hat{\tau}\) is a given value corresponding to the derivative of the solution \(u\) in the point \(l\) (Neumann boundary condition).
 |
|---|
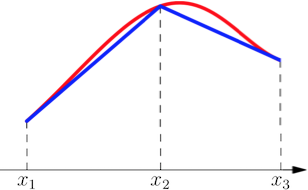
| The graph shows an exact smooth solution (red curve) and its piecewise linear approximation using the FEM (blue curve). |
%----------------------------------------------------%
% FEM 1D %
%----------------------------------------------------%
function FEM1D
% Input data
x = 0 : 1/2 : 1; % nodes coordinates
el = [1, 2; 2, 3]; % element nodes (element per row)
k = [1, 1]; % material coeffs
f = [0.75, 0.25]; % sources in elements
bc = [0, 1, 2; 1, 3, 0.25]; % boundary conditions in format [type (0-Dirichlet/1-Newton), node, value] per row
n = length(x); % num of nodes
nel = size(el, 1); % num of elements
% Assembling of local FEM systems
Ael = [1, -1; -1, 1];
bel = [1; 1];
% Assembling of global FEM system
A = zeros(n, n);
b = zeros(n, 1);
for i = 1 : nel
A(el(i, :), el(i, :)) = A(el(i, :), el(i, :)) + (k(i) / (x(el(i, 2)) - x(el(i, 1)))) * Ael;
b(el(i, :)) = b(el(i, :)) + (0.5 * f(i) * (x(el(i, 2)) - x(el(i, 1)))) * bel;
end
% Incorporation of boundary conditions
for i = 1 : 2
if bc(i, 1) == 1
b(bc(i, 2)) = b(bc(i, 2)) + bc(i, 3);
end
if bc(i, 1) == 0
b = b - bc(i, 3) * A(:, bc(i, 2));
A(:, bc(i, 2)) = zeros(n, 1);
A(bc(i, 2), :) = zeros(1, n);
A(bc(i, 2), bc(i, 2)) = 1;
b(bc(i, 2)) = bc(i, 3);
end
end
% Solving of the FEM
u = A \ b
% Graphical output
plot(x, u, '-ob', 'LineWidth', 2, 'MarkerEdgeColor', 'k', 'MarkerFaceColor', 'g', 'MarkerSize', 10);
hold on; grid on;
title(texlabel('FEM 1D'), 'FontSize', 14);
xlabel(texlabel('x'), 'FontSize', 14);
ylabel(texlabel('u(x)'), 'FontSize', 14);
